graph TD; A(图的存储);; A-->B1(邻接矩阵)==>C1[数组实现,空间复杂度高]; A-->B2(邻接表)==>C2[顺序存储+链表实现]; A-->B3(十字链表)==>C3[存储有向图]; A-->B4(邻接多重表)==>C4[存储无向图]; C3-->D1(代码复杂考研很少考); C4-->D1;
邻接矩阵法
1 |
|
对于无向图来说:邻接矩阵具有对称性
无向图的第i个顶点的度:第i行或第i列的非零元素个数($E\neq0$的个数)
有向图的第i个顶点的度: 出度:第i行非零元素个数 入度:第i列的非零元素个数 度=出+入
性能分析:空间复杂度$O(n)$ 只适用于存储稠密图
对于无向图可采用对称矩阵的压缩压缩存储
策略:存储主对角线和下三角区,按行优先
$a_{i, j}\rightarrow B[k]$
$k=\frac{i(i-1)}{2}+j-1 $
一些性质:
图G的邻接矩阵为A(矩阵元素为0/1, 即不带权值),则$A^n$中的$a^n_{i, j}$就为由$i$到$j$的长度为$n$的路径数目
邻接表
1 |
|
性能分析:
对无向图:每条边有两个顶点,所以空间复杂度为$O(2|E|+|V|)$
对有向图:空间复杂度$O(|E|+|V|)$
计算度:
对无向图:遍历对应的链表
对有向图:
- 出度:遍历对应链表
- 入度:遍历除自己外所有对应链表
十字链表
1 | typedef struct AcrossAcrNode |
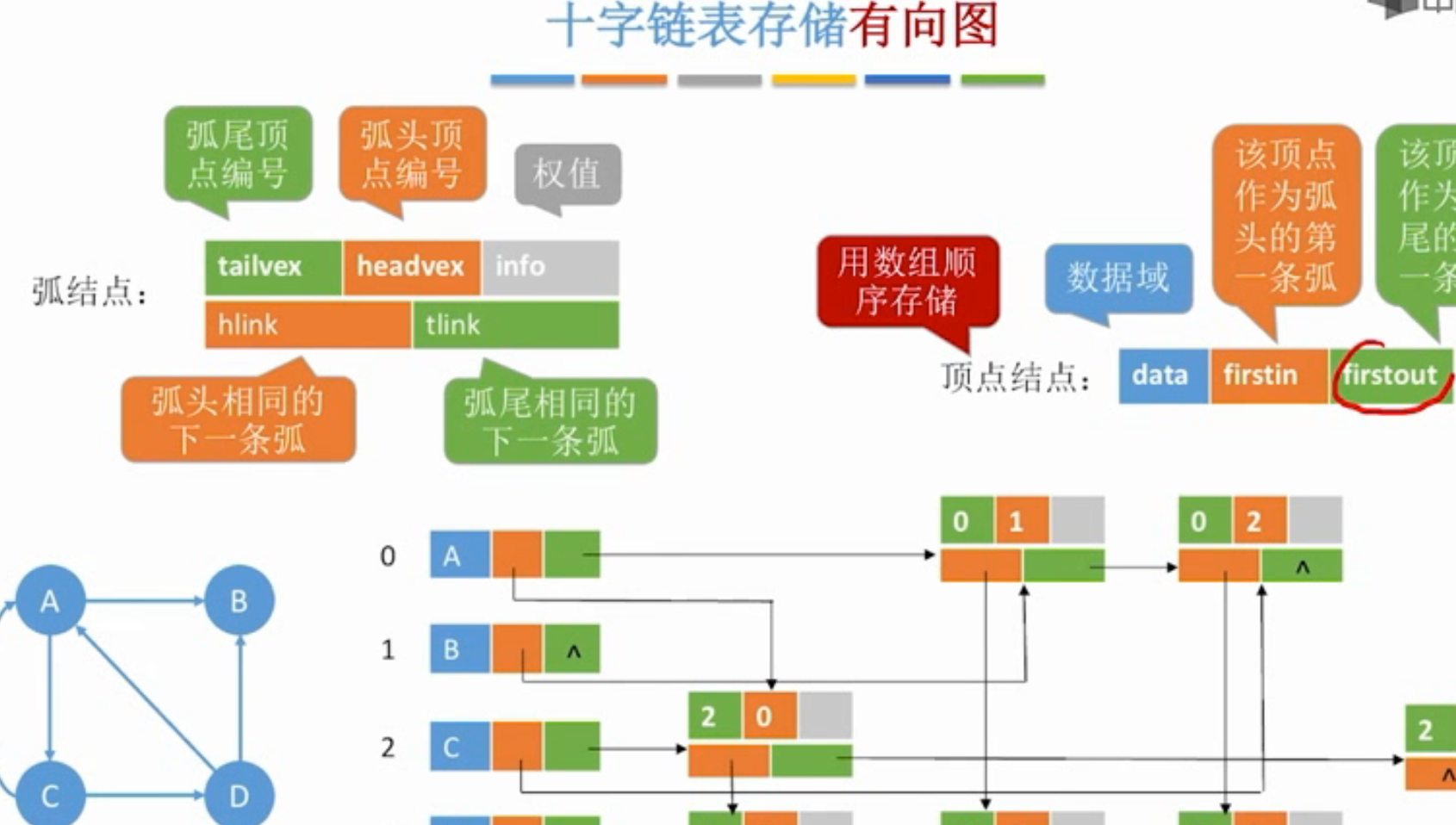
性能分析:
空间复杂度$O(\lvert E \rvert +\lvert V \rvert)$
找到入边:顺着hlink一直找
找到出边:顺着tlink一直找
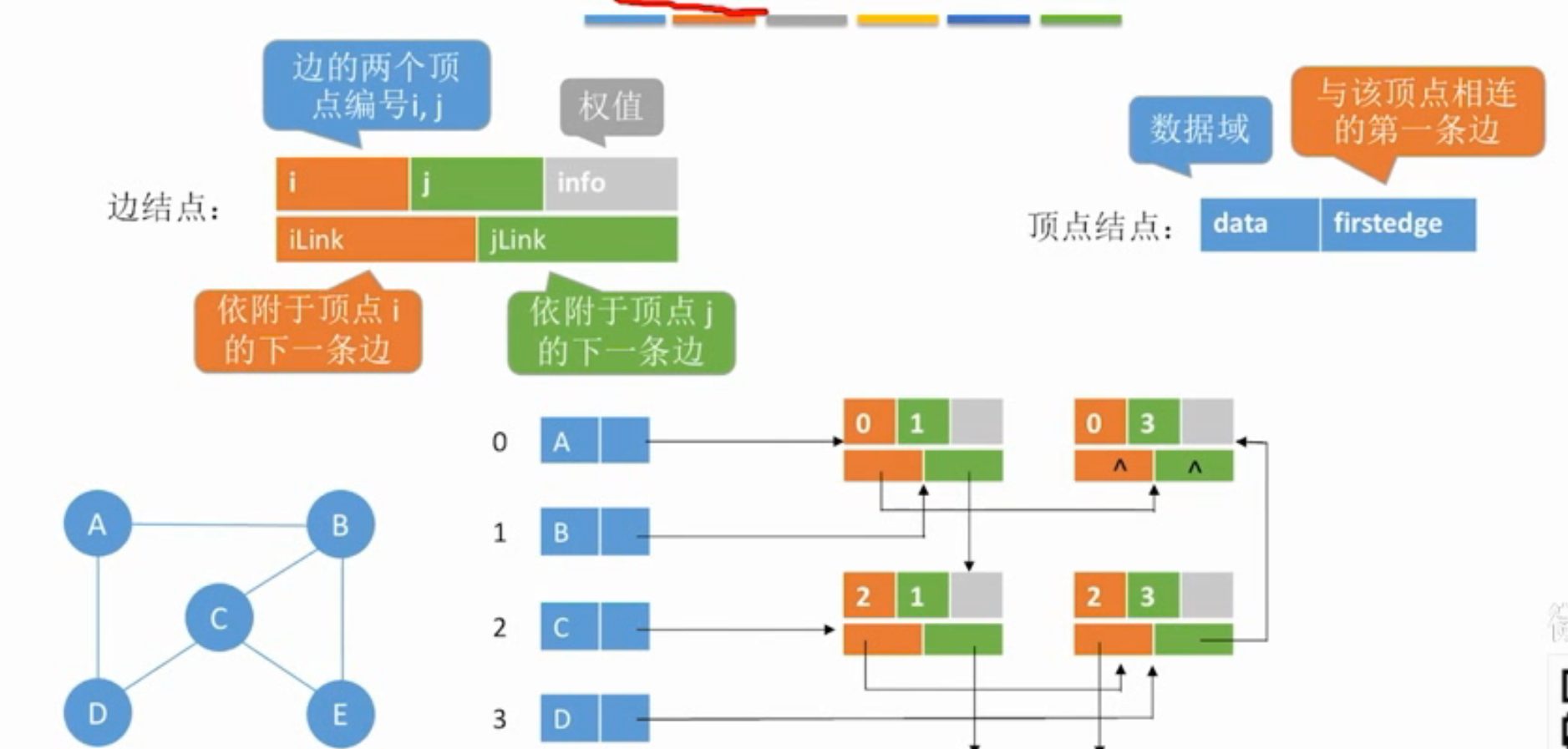
邻接多重表
总结
| 邻接表 | 邻接矩阵 | 十字链表 | 邻接多重表 | |
|---|---|---|---|---|
| 空间复杂度 | 无向图$O(2\lvert E \rvert + \lvert V\rvert )$ 有向图$O(\lvert E \rvert +\lvert V \rvert )$ | $O(\lvert V^2\rvert)$ | $O(\lvert E \rvert +\lvert V \rvert )$ | |
| 适合于 | 储存稀疏图 | 储存稠密图 | 有向图 | 无向图 |
| 表示方式 | 不唯一 | 唯一 | 不唯一 | 不唯一 |
| 计算度 | 计算有向图的度、入度不方便 | 遍历对应行 | 老方便了 | 老方便了 |
| 找相邻边 | 找有向图的入边不方便 | 遍历对应行 | 老方便了 | 老方便了 |
| 删除边或顶点 | 删除边很方便,删除点要移动大量数据 | 无向图不方便 | 老方便了 | 老方便了 |