如何挂载 EXT4 硬盘
确定磁盘,在powershell中运行以下命令:
1 | Get-Disk | Format-Table Number, FriendlyName, Size, HealthStatus |
A coroutine is a function that maintains its state between calls. In that, it’s a bit like a function object, but the saving and restoring of its state between calls are implicit and complete.
计算算例为:
1 | auto domain{std::make_shared<xfdtd::Object>( |
毕设是做FDTD仿真的,打算弄一套完整的程序。目前把基础部分搭建起来了,就是FDTD算法核心部分。这部分代码是用C++写的,为了方便以后的使用,打算把这部分代码封装成一个库。方便以后写CLI或者GUI程序的时候直接调用。这是我第一次尝试写一个库,遇到了一些问题,记录一下。
前向声明:水平不高,一知半解,仅做记录,分析全错。问题的来源都是对于作用域的理解不够深刻。
记录一下FDTD仿真遇到的一个问题。碎碎念
考虑如下一个球体散射的例子
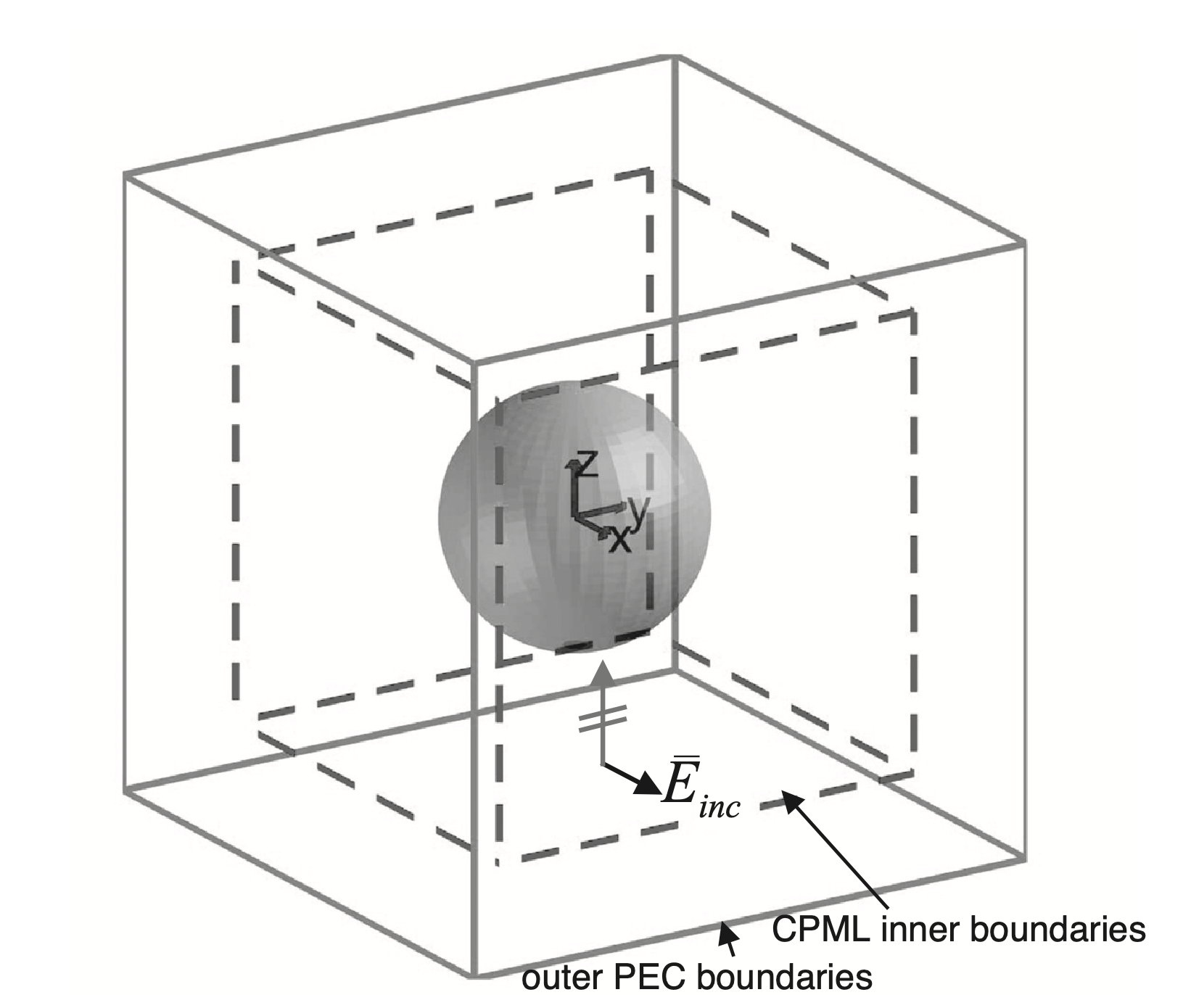
球体半径为0.1。入射场是沿着z轴传播的平面波,极化方向为x,波形为高斯波形。
如下的模版函数
考虑一个在自由空间中一维传播波方程
该方程的通解为: